一、团队简介
水下机器人作业技术团队(原水下运载器智能控制技术团队)成立于1999年,带头人为张铭钧教授,依托于国家特色学科和黑龙江省重点一级学科“机械工程”和国家首批一流本科专业“机械设计制造及其自动化”,主要从事水下机器人作业技术及机电系统测控技术方面的科研和教学工作。二十多年来,团队坚持以国家经济和现代化建设重大需求为引导,坚持走支撑装备建设、服务海洋开发工程应用的特色建设之路,重点开展了水下机器人故障诊断与容错控制、安全决策与可靠抛载、目标定位与自主作业、水面收放与水下对接等相关技术及特种作业机器人系统的研究工作。先后承担国家自然科学基金委、相关部门、行业内科研院所项目40余项,科研成果获省部级奖励10余项,发表高水平论文200余篇,授权发明专利70余项,出版专著4部,教材3部,培养硕士研究生130余人、博士研究生20余人,为国家海洋强国战略提供有力支撑。
团队是哈尔滨工程大学“水下机器人技术”国家级重点实验室、“舰船特辅与水下装备”重点实验室和“水下作业技术与装备”黑龙江省重点实验的重要组成部分,目前拥有专任教师6人,其中教授3人,副教授2人,讲师1人,在读硕、博研究生40余人。

二、研究方向
1.水下机器人相关技术
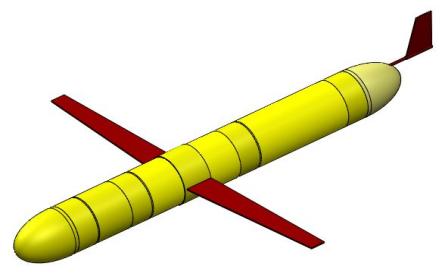
(1)水下机器人路径规划及智能控制技术
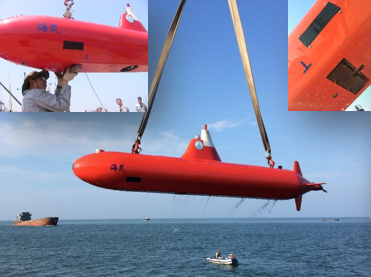
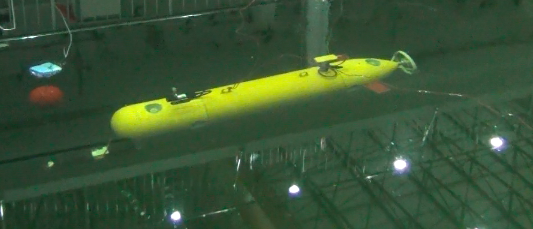
在水下机器人智能控制技术方面,团队面向水下机器人的三维路径规划方法、预测控制方法、轨迹跟踪控制方法等开展了研究工作,研制了流线型、框架式水下机器人样机,针对自主式水下机器人区域跟踪控制问题,提出了自适应滑模控制器,进行了仿真与水池实验,实验结果证明了方法的有效性。
(2)水下机器人故障诊断及容错控制技术
在水下机器人故障诊断与容错控制技术方面,团队面向水下机器人推进器、传感器的故障诊断技术进行了研究,提出了环境干扰和故障的分离方法、弱故障诊断与趋势预测方法、多故障融合诊断方法, 故障程度分析及故障趋势预测方法,针对推进器故障,提出了主动容错控制方法和自适应容错控制方法,仿真和水池试验验证了方法的有效性。
(3)自主式水下机器人可靠抛载及安全性技术
针对自主式水下机器人安全自救、无动力下潜上浮、载荷布放和投送等需求,设计研制了电磁驱动抛载装置、纯机械超深抛载装置、纯机械定时抛载装置,搭载于“智水”系列AUV、“悟空”号全海深AUV等十余型水下机器人上,进行了150余次海试,抛载成功率100%,有效保障了水下机器人的作业安全。
(4)水下目标辨识、定位及自主作业技术
面向自主式水下机器人(AUV)水下作业问题,团队研发了适用于AUV保形搭载的小型电动机械手和大展臂液压机械手,具备危险状态自动解脱功能,提出了手艇协调控制方法及AUV姿态主动调节方法,设计了水下图像增强算法,实现了水下特定目标的识别和定位,完成了AUV样机的自主作业水池试验。
(5)水下机器人水下对接技术
在水下机器人水下对接技术方面,团队面向自主式水下机器人水下回收、充电、信息交换等需求,设计了适应于不同类型、尺寸的水下机器人对接装置,研制了水下机器人缓冲、捕捉、锁紧、方位调整、姿态调整、液压动力及控制、环境感知、状态监测等功能模块,并完成了海试验证。
2.特种作业机器人技术
面向水下、陆上等极限、恶劣场合作业需求,团队具备各种类型特种机器人构型设计和软、硬件研发的能力,开发了适用于各类型机器人作业的通用型核心控制模块,环境和状态感知处理模块,电动、液压驱动模块,研制了模块化水下机器人,仿生海龟水下机器人,水陆两栖机器人,矿井灾后搜救机器人,管道检测清洗机器人,自动跟随移动机器人等特种作业机器人。
3.机电系统测控技术
团队面向机电系统机器人系统高精度控制、参数性能测试测量等需求开展相关研究工作,开发了水面船遥测遥控系统,陆上机器人规划控制性能评估系统,电机扭矩转数测量系统,研制了井下多参数测量仪、不规则结构体重心重量测量,基于视觉检测的大型结构物位姿测量系统,多组并联六自由度平台位姿协调控制系统等。
三、标志性成果
1.水下机器人相关技术
(1)水下机器人智能控制技术
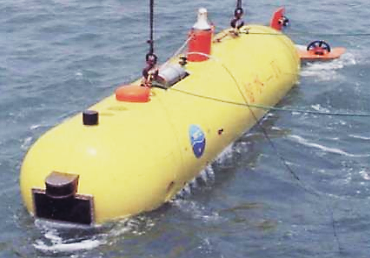
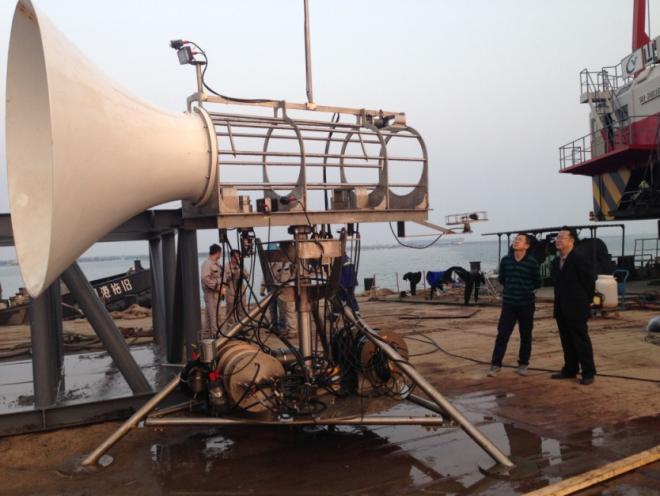
团队研制了开架式AUV、舵桨联控式AUV及小型全驱动AUV,可以完成自动定深定向定高航行,搭载各种类型声、光、磁探测设备,完成水下目标探测及作业,开发了AUV嵌入式硬件、软件控制系统及自主规划与智能控制算法。2010年9月,“水下机器人智能控制技术研究”获黑龙江省科学技术自然类二等奖。
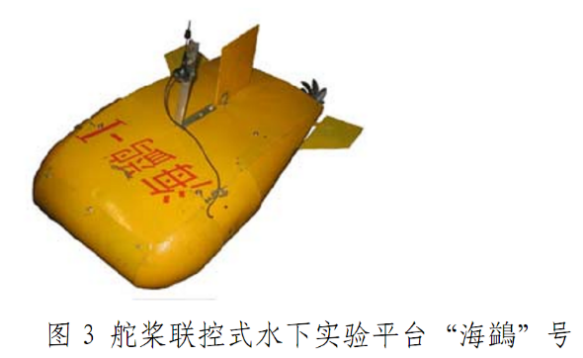


水下机器人试验平台及获奖证书
(2)水下机器人故障诊断技术
十五期间,在研究项目支持下,团队针对水下机器人的状态监测及故障诊断技术开展研究工作,获得海洋环境中AUV故障诊断系统对外部干扰的处理方法,传感器信号中外部随机干扰和系统故障的分离方法,非线性系统多源特征信号的获取方法及故障隔离方法,实现一致性描述的AUV传感器故障检测与信号重构方法以及外部持续干扰影响下的AUV推进器故障模糊定性诊断方法。获得基于支持向量域描述的推进器故障模式识别方法,解决基于定性学习的推进器故障程度辨识问题,给出基于故障程度的推进器优先等级确定方法,完成基于伪逆二次规划控制分配的容错控制律在线重构,为提高海洋环境中 AUV及其它水下作业装备的安全性与可靠性提供理论与技术支撑。2007年12月,“某状态监测技术”获国防科学技术进步三等奖。
改进SVDD方法建模 AUV右主推进器故障模型
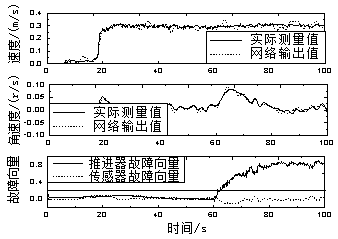
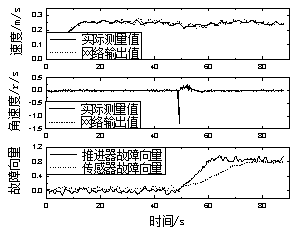
推进器故障观测器输出 并发故障观测器输出
(3)水下机器人可靠抛载技术与系统
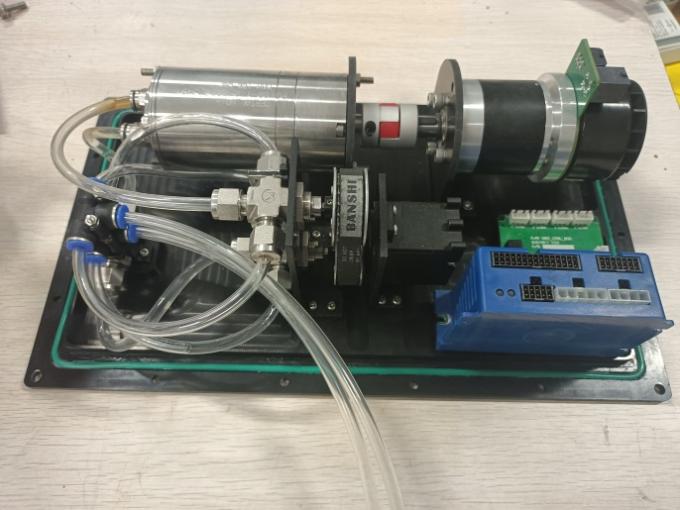
团队作为哈尔滨工程大学“水下机器人技术”国家级重点实验室的重要组成部分,为“智水”系列AUV及“悟空号”全海深AUV等各类型AUV研制可靠抛载系统,保障AUV“出得去,回得来”。研制了机电混合控制抛载机构并通过了试验验证。通过与AUV主控系统通讯、定时模块计时、压力变送器测定深度、漏水探针检测、检测电源电压实现了五种抛载控制模式,同时设计的并行释放机构,解决了冗余抛载问题;研制了基于海水压力和机械定时器的机械式抛载装置,实现了纯物理方式的安全抛载模式。并与机电混合控制抛载机构集成,满足了紧急情况下的主被动、多模式抛载自救需求。2017年10月,“水下机器人故障诊断与安全自救技术”获黑龙江省科学技术发明二等奖,2020年12月,参研的“300 公斤级小型智能探测系统开发”项目获黑龙江省科学技术进步类二等奖。

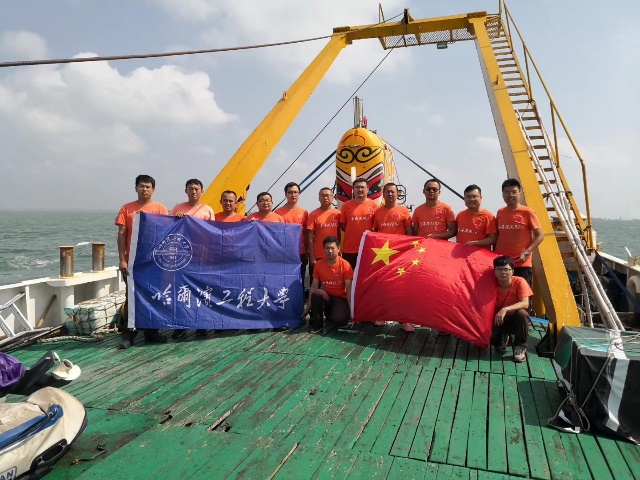
水下机器人抛载系统

水下机器人抛载系统相关获奖证书
(4)自主作业水下机器人系统
十二五期间,在2项国防基础研究项目支持下,团队开展了AUV自主作业关键技术研究,包括微小型AUV模块化电动机械手及其保形搭载技术,全驱动AUV大展臂作业机械手及其水液压驱动技术,水下单目光视觉与声学定位融合的目标识别与定位方法,水下机器人头-手双目立体视觉目标识别与定位方法,水下机器人手-艇协调运动规划及位姿自适应控制技术,研制了可搭载与AUV系统的独立驱动的水液压机械手、折叠式电动机械手、摆动关节模块化机械手、适于远程遥控的同构主手,以及基于气动和液压的手艇快速解脱技术和装置。在水池环境下成功完成了全自主目标探测、定位好机械手剪缆作业。2017年,“自主式水下机器人作业技术”获科技进步二等奖,整体性能达到国际先进水平,为拓展AUV功能,加快AUV实用化进程提供了理论与技术支撑。


自主式水下机器人作业系统及获奖证书
(5)水下机器人水下对接技术与系统
十二五期间,团队参加“自治式潜器搭载对接技术”的研究工作,开展了AUV水下对接技术研究,为了实现欠驱动AUV的水下对接、充电及信息交换,研制了转轴回转驱动模块、锁死模块、定位触发机构、夹紧机构、充电对接模块及流速流向测量模块。转轴锁死模块具有制动力矩大、制动时间短的优点;回转驱动模块具有回转角度范围大、回转速度平稳的优点;定位触发机构模块具有感应灵敏度好、可靠性高的优点;夹紧机构模块夹紧力和顶升高度适中,满足使用要求;充电对接模块具有对接准确度高、自适应斜度大、间隙小等优点;流速流向模块具有测量精度高的优点。2019年1月,参研的“深海欠驱动AUV自主对接与非接触式能量补偿系统及应用”项目获海洋工程科学技术一等奖。

水下对接系统及获奖证书
(6)水下机器人浮力与姿态调节系统
针对水下机器人及作业平台无动力上浮下潜及姿态调节的需要,研究了基于改变容积原理的充排油技术和基于改变重量原理的充排海水技术,解决了高外压、大排量、小体积、高精度等的浮力调节和AUV姿态控制关键问题,研制了多种类型、宽调节范围、高调节精度的浮力调节和姿态调节系统,搭载于大深度AUV、深海浮沉载荷、两栖机器人等多种水下装备上,完成了海试试验,验证了浮力调节和姿态调节系统的有效性和可靠性。


充排油浮力调节系统 高压充排海水系统

大重量充排海水系统 高精度充排海水系统

AUV姿态调节系统
2.特种机器人技术
(1)仿生海龟水下机器人
以海龟生物原型为研究对象,获得了海龟水翼法推进机理及其力学特性,设计了半骼式柔性仿生水翼,通过单肢实验验证了样机仿水翼法驱动的可行性,提出了水翼双旋协同分段式控制方法和双翼协同角速度在线调节方法,解决了水翼协同运动问题,设计并研制了仿生海龟实验样机,完成了运动控制性能水池实验,验证了柔性水翼仿生推进的可行性,为开发水下新型驱动方式和仿生载体技术提供理论基础和技术支撑。
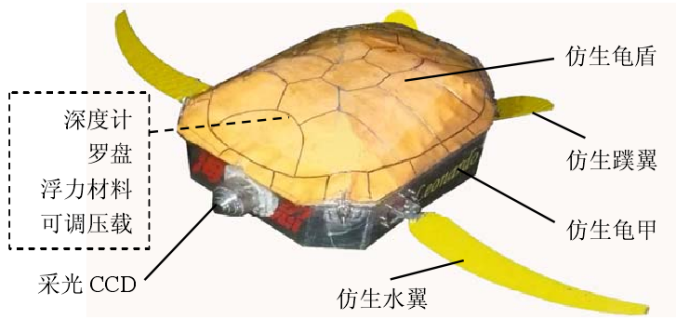

仿生海龟机器人组成及水池试验
(2)可重构模块化水下机器人
为使水下机器人具有更强的适应性,满足不同环境、不同任务和不同目标的作业需求,基于模块化设计思想对微小型水下机器人系统进行分析,划分了功能模块和单元模块,设计了各标准化的机械、电气连接接口,研制了由主控单元、重心调节单元、浮力调节单元、舵机单元、推进器单元等单元模块组成的“海梭Ⅱ”号模块化水下机器人试验样机,给出了水下机器人重构策略和方案,水池试验验证了可重构模块化水下机器人的可行性。


水下机器人模块及水池试验
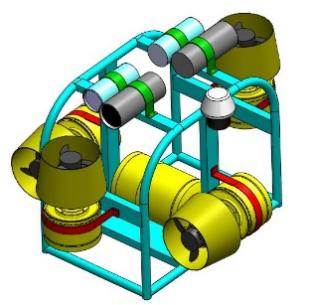
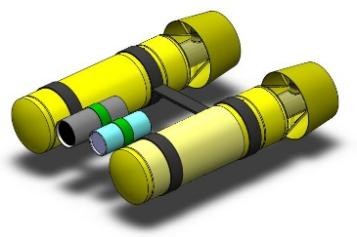
水下机器人模块重构
(3)水陆两栖机器人
面向近海探测、作业需要,研制了一种履带—浆联合驱动式水陆两栖机器人,具备陆上、水面、水中及水底运动的能力,可实现远程遥控和自主控制。机器人搭载了深度计、高度计、电子罗盘和GPS等传感器,具备三维路径规划、自主运动规划和路径跟踪控制和避障能力,可实现陆上、水面、水底的定向、定速行驶和水中的定向、定深、定高航行。机器人可与控制台或手持终端进行远距离通信并回传实时图像信息。

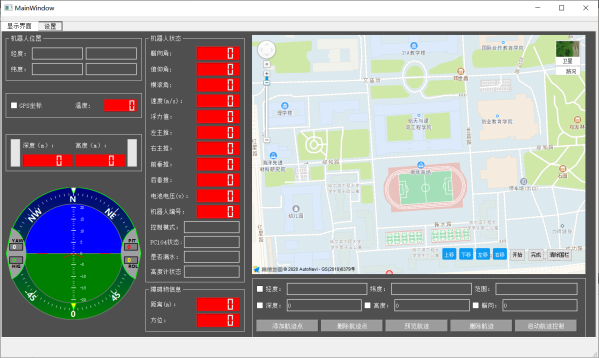
两栖机器人系统 远程监控软件
(4)管道清洗机器人
GD-1056管道机器人是一款主要用于管道检测及清洗修复的作业系统。该系统包括行走机构、升降机构、轴向移动机构,通过激光清洗系统、毛刷清扫系统、机械臂等工具,可实现对管道的锈斑清洗、粉尘清扫、异物清理等功能。同时,机器人上搭载有高清变焦低延时摄像机,可对于管道内部的情况进行实时影像监测、记录、视频回放、图像抓拍及视频文件的存储等操作,无需人员进入管内即可了解管道内部状况。


管道清洗机器人系统
3.机电测控系统
(1)水下机器人重心测量系统
水下机器人的重心是水下机器人运动控制和姿态调节中用到的重要参数,基于三维模型进行估计会存在一定的误差,团队基于多点衡重法中可倾斜平台法,研制了水下机器人重心测量试验平台,设计开发了测量过程实时监控系统软件,并可在获得的重心坐标位置基础上,运用三维软件分析出机器人浮力、浮心,在水下机器人坐标系下,给出了水下机器人静态姿态调节的数学模型,为水下机器人的设计、试验提供准确的参数指导。

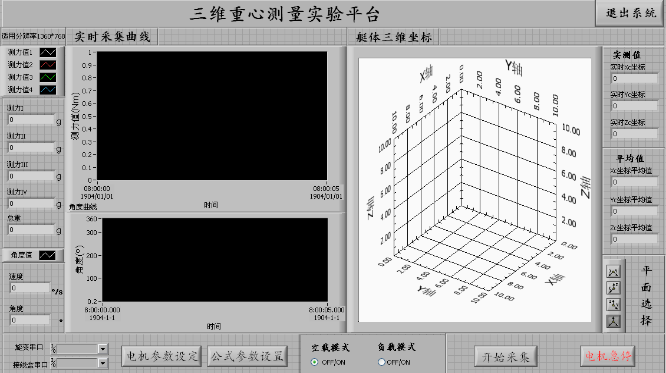
重心测量系统 重心解算软件
(2)视觉测量系统
面向机器人、机械臂、执行机构等多系统间自动、自主对接、对准等作业需求,研制了可在高低温、霉菌、湿热、盐雾、沙尘以及振动冲击等恶劣环境下工作的高精度视觉测量系统,采用双目视觉及灯光组合,内嵌图像处理系统,可以对合作、非合作目标进行准确辨识和高精度定位,为执行机构提供准确的相对位姿信息。系统结构紧凑,可重复安装免标定,替换性好,针对大尺度测量,可多机组合使用,自动识别主从关系,互换性好。该系统已应用于某所某型装备。


视觉测量系统 某型合作靶标
团队成立二十余年来,致力于高水平科技创新和高层次人才培养,科研和教学工作有机融合,形成了“团结、务实、创新、奉献”的团队文化。团队始终坚持立德树人根本任务,加强学生思想作风引导,提升科技创新能力,促进国际交流合作,为学生提供了良好的学习和工作环境,团队师生团结一心,谋求高质量发展,脚踏实地,干实事、重实效,刻苦钻研,勇于突破,追求进步,服务国家需求和行业需要,实现自我价值。

国内学术报告

博士生联合培养
五、联系方式
张铭钧 教授(团队带头人) 联系电话:0451-82519709 办公室:61#2052 | 博士,教授,博士生导师。主持科研项目30项,获省部级科技奖励一等奖1项、二等奖6项、三等奖2项,发表SCI、EI检索论文150余篇,发明专利授权50余项,主编《水下机器人》等专著和教材4部。2001年获黑龙江省留学人员奖,2004年入选511人才工程”学术带头人,2006年省优秀导师,2014年获省政府特殊津贴。中国自动化学会技术过程故障诊断与安全性专业委员会委员、黑龙江省机械工程学会常务理事。 |
赵文德 教授 联系电话:0451-82519709 办公室:61#2050 | 硕士,教授,硕士生导师。1986年从哈尔滨船舶工程学院机械系本科毕业,分配到哈尔滨制氧机厂从事产品研发,1997年哈尔滨市劳动模范。2000年至今,主持科研项目10项,主要从事实验研究工作,“海狸”系列、“SY”系列水下机器人实验平台主要研制者,获得省部级科学技术奖二等奖4次、三等奖2次,发表学术论文10余篇,授权发明专利20余项。 |
王玉甲 教授 联系电话:13604800910 办公室:61#1056 | 博士,教授,博士生导师。1997年至2006年就读于哈尔滨工程大学,获得工学博士学位;2006年至2009年,哈尔滨工业大学机械工程博士后,2014年访学英国南安普顿大学。主要研究方向包括水下机器人系统整体设计、故障诊断、容错控制、自主作业技术,移动机器人自主规划、智能控制、性能评估技术及机电液一体化系统运动控制技术等。 获科技进步二等奖1项,三等奖1项,获黑龙江省科学技术二等奖4项,发表论文60余篇,SCI收录10余篇,EI收录50余篇,获得发明专利授权50余项,出版专著1部,编著2部,教材1部。指导博士研究生2人,硕士研究生30余人。 |
姚峰 副教授 联系电话:139-4566-3924 办公室:61#1056 | 博士,副教授,硕士生导师。2004年至2008年就读于中南大学,获得学士学位;2009年至2012年就读于哈尔滨工程大学,获得硕士学位;2012年硕士毕业后留校任教;2013年至2019年就读于哈尔滨工程大学,获得博士学位。主要从事水下机器人系统集成与运动控制、水下机器人自主作业、基于状态空间方程的模型预测控制等方向的研究,研究课题主要涉及水下机器人自主作业、两栖机器人设计与控制、自主式水下机器人安全自救与可靠抛载等。获得科技进步二等奖1项,黑龙江省科技发明二等奖1项,从事教学科研工作10年,主持或参与国家课题10项,省部级及企业委托课题10余项。 |
刘 星 讲师 联系电话:15124511964 办公室:61#2050 | 博士,讲师,硕士生导师。2008年至2018年就读于哈尔滨工程大学,先后获得学士及博士学位;2017年在英国南安普顿大学进行为期1年的博士联合培养研究。主要从事水下机器人故障诊断、容错控制、自主作业等方向的研究,研究课题主要涉及水下机器人推进器故障诊断、区域跟踪、自适应容错控制研究。主持省部级项目1项。以第一/通讯作者发表论文17篇,其中SCI论文13篇,EI论文4篇;获授权发明专利6项;2017年获黑龙江省技术发明二等奖。 |
李佶桃 副教授 联系电话:18846754186 办公室:61#2055 | 博士,副教授。2016年获南京航空航天大学-乌克兰国立茹科夫斯基航空航天大学工学双学士;2016年至2021年就读于哈尔滨工业大学,获得博士学位。2019年至2020年赴新加坡南洋理工大学公派联合培养。主要从事水下机器人故障诊断与容错控制、状态监测、信息物理系统安全等方向的研究,研究课题主要涉及集员理论及其应用、有限频域分析及其应用研究。发表SCI检索论文10篇。 |